3DShape2VecSet¶
3DShape2VecSet: A 3D Shape Representation for Neural Fields and Generative Diffusion Models (SIGGRAPH 2023)
3DShape2VecSet 是 VecSet 路线的奠基工作,提出了一种将 3D 形状编码为固定长度潜向量集(latent vector set)的表示方法,并在此基础上搭建扩散模型进行 3D 形状生成。它首次证明了 set-based latent 可以有效替代体素或点云特征,成为后续 CLAY、Michelangelo、TripoSG 等方法的共同起点。
核心问题¶
在 3DShape2VecSet 之前,3D 生成的隐空间设计面临两个困难:
- 固定网格绑定:基于体素或 triplane 的方法将潜变量绑定到固定的空间位置上,在面对复杂拓扑和不规则几何时难以灵活适应。
- 维度不统一:点云或 mesh 的顶点数量因形状而异,很难用统一维度的隐空间进行表示和生成。
3DShape2VecSet 的解决思路是:
用一组固定数量(M 个)的潜向量组成的集合来表示 3D 形状,这些向量不绑定到任何空间坐标上,而是通过 cross-attention 与 3D 空间建立关系。
编码器:从 3D 形状到 VecSet¶
编码器的任务是将一个 3D 形状压缩为 \(M\) 个潜向量,论文探索了两种方式:
Learnable Queries (DETR 式)¶
- 随机初始化 \(M\) 个可学习 query 向量
- 通过 cross-attention 让 query 向量从输入点云中聚合信息
- 类似于 DETR 中 object queries 的机制
Point Queries (FPS 下采样)¶
- 用 Farthest Point Sampling (FPS) 从输入点云中选取 \(M\) 个锚点
- 以锚点坐标作为 query 的位置编码
- 通过 cross-attention 从完整点云中聚合特征
实验表明 Point Queries 效果更好,因为锚点提供了明确的空间参考位置,使 cross-attention 更容易聚焦。
KL 正则化¶
编码器输出的每个潜向量维度为 \(C=512\),通过线性层压缩到 \(C'=32\) 的低维空间,并施加 KL 正则化(权重 0.001)约束潜空间接近标准高斯分布。最终的 VecSet 形状为 \(M \times C' = 512 \times 32\)。
解码器:从 VecSet 到隐式场¶
解码器接收 VecSet 潜向量集和一组 3D 查询点坐标,输出每个查询点的 occupancy 值。
流程如下:
- Self-Attention 处理 VecSet:多层 self-attention blocks 让 \(M\) 个潜向量之间交换信息,形成全局一致的形状表示
- Cross-Attention 插值:查询点坐标作为 query,VecSet 作为 key/value,通过 cross-attention 为每个查询点聚合相关特征
- FC 层预测 Occupancy:聚合后的特征经全连接层输出 occupancy 概率
这里的关键设计在于:cross-attention 替代了传统的空间插值(如三线性插值)。传统方法需要潜变量有明确的空间位置才能进行插值,而 cross-attention 让查询点自动找到与之相关的潜向量,潜变量不需要绑定到固定网格上。
损失函数¶
自编码器的训练损失由两部分组成:
- BCE Loss:对查询点的 occupancy 预测施加二元交叉熵监督
- KL Loss:约束编码器输出的潜分布接近标准高斯,\(\lambda_{\text{KL}} = 0.001\)
扩散模型:在 VecSet 上生成¶
在 VecSet 潜空间上训练扩散模型进行生成。采用 EDM (Karras et al., 2022) 框架:
去噪网络¶
- 架构为纯 self-attention transformer
- 输入是加噪后的 VecSet(\(M \times C'\))
- 条件信息(如类别、图像、文本)通过 cross-attention 注入
- 输出去噪后的 VecSet
采样¶
- 使用 18 步去噪采样
- 生成的 VecSet 送入解码器,对密集 3D 网格点查询 occupancy,再通过 Marching Cubes 提取 mesh
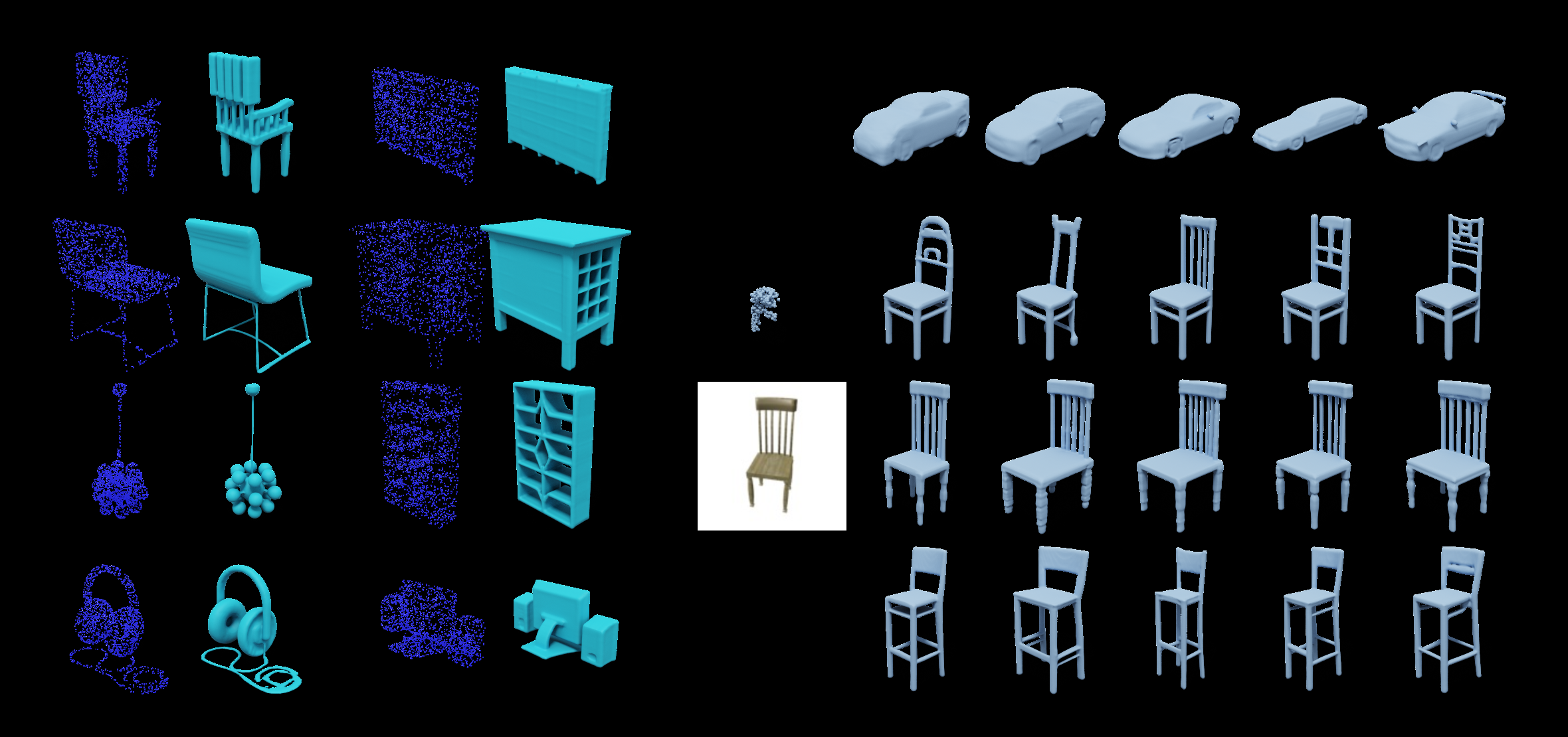
实验结果¶
在 ShapeNet-v2 的 55 个类别上评估:
自编码重建质量¶
| 指标 | 数值 |
|---|---|
| IoU | 0.974 |
| Chamfer-L1 | 0.309 |
| F-Score (τ=0.01) | 0.969 |
无条件生成质量(椅子类别)¶
| 指标 | VecSet | 3DILG | AutoSDF |
|---|---|---|---|
| FID ↓ | 33.0 | 41.2 | 50.4 |
| KID ↓ | 0.020 | 0.027 | 0.031 |
关键数字¶
| 参数 | 值 |
|---|---|
| 潜向量数量 \(M\) | 512 |
| 潜向量维度 \(C'\) | 32 |
| 编码器维度 \(C\) | 512 |
| 去噪步数 | 18 |
| AE 训练 | 8× A100 |
| Diffusion 训练 | 4× A100 |
与后续工作的关系¶
3DShape2VecSet 开创了 VecSet 路线,后续工作在此基础上做了不同方向的扩展:
- CLAY / Michelangelo:将 VecSet 与更强的条件输入(文本、图像)结合,扩展到更大规模数据
- TripoSG:沿 VecSet 思路做 scaling,配合大规模数据和 Rectified Flow Transformer
- TRELLIS / SLAT:从纯 set 走向 structured latent,给 VecSet 加入空间结构
- LATTICE / VoxSet:在 VecSet 和 structured voxel 之间找到折衷的半结构化表示
VecSet 的核心洞察——潜变量不需要绑定到固定空间位置,通过 cross-attention 即可建立与 3D 空间的关系——被后续几乎所有 set-based 3D 生成方法继承。
局限¶
- 编码器依赖输入点云的采样质量,对稀疏或不均匀采样的鲁棒性有限
- 解码器的 cross-attention 在查询点数量很多时计算开销较大
- VecSet 中每个潜向量的语义角色不明确,难以进行可控的局部编辑
- 仅在 ShapeNet 上验证,未在大规模多样化数据(如 Objaverse)上测试
总结¶
3DShape2VecSet 的核心贡献是证明了用一组不绑定空间位置的潜向量集合来表示 3D 形状是可行且有效的。这一思路绕过了体素网格和 triplane 的空间绑定限制,为后续 VecSet 系列方法奠定了基础。虽然原始方法仅在 ShapeNet 上验证,但其 set-based latent + cross-attention decoding 的范式已经成为 3D 生成领域的基本构建块之一。