Sparc3D¶
Sparc3D: Sparse Representation and Construction for High-Resolution 3D Shapes Modeling
Sparc3D 关注的问题是:现有的 3D VAE 在压缩和重建时会损失大量细节,这是因为表示方式和监督信号之间存在模态不匹配。 它的回答是用一套完全基于稀疏卷积的 3D 原生管线来消除这个 gap。
核心问题¶
当前主流的 3D 生成管线几乎都是两阶段:
- VAE 压缩:把 3D shape 编码到 latent space
- Latent diffusion:在 latent space 做扩散生成
问题出在第一步。现有 VAE 的两种常见路线各有缺陷:
2D 监督路线(如 TripoSG 的多视角渲染损失):
- 编码器/解码器可能用 2D backbone
- 3D 几何信息经过 2D 投影再重建,细节丢失不可避免
- 存在模态不匹配:输入是 3D mesh,监督是 2D 渲染
3D 监督但用 dense grid 路线:
- 分辨率受限于显存:dense \(256^3\) 已经是极限
- 远不够捕捉细节几何
方法概述¶
Sparc3D 包含两个核心组件:
Sparcubes:稀疏可变形 Marching Cubes 表示¶
Sparcubes 可以看作 FlexiCubes 的稀疏版本:
- 将 mesh 转换为稀疏立方体网格上的 SDF + 变形场
- 只保留表面附近的立方体,而非整个空间的 dense grid
- 分辨率可达 1024^3,因为稀疏存储大幅降低显存需求
- 支持开放表面、断开组件、复杂拓扑
- 整个表示是可微的,可以通过渲染损失做端到端优化
与 SparseFlex 的思路相似,但 Sparc3D 更强调与下游 VAE 的模态一致性。
Sparconv-VAE:纯 3D 稀疏卷积 VAE¶
关键设计决策:编码器和解码器完全用稀疏 3D 卷积网络构建。
- 编码器:接收 Sparcubes 表示,通过稀疏卷积逐步压缩
- latent space:也是稀疏 3D 特征图,不是 2D 特征或 unstructured set
- 解码器:稀疏卷积上采样,直接输出 Sparcubes 表示
这意味着整个管线中没有 2D → 3D 或 3D → 2D 的模态转换。输入是 3D,中间是 3D,输出是 3D。论文称之为 modality-consistent(模态一致)。
损失函数¶
Sparconv-VAE 训练¶
几何损失 \(\mathcal{L}_{geo}\) 完全在 3D 空间定义(无 2D 渲染损失):
- SDF 回归:预测的 corner SDF 值与 GT SDF 之间的 L1 损失
- 变形场回归:预测的 deformation vectors 与 GT 之间的 L2 损失
- Occupancy 损失:稀疏 voxel 的活跃/非活跃分类 BCE 损失
- 表面采样点损失:从重建 mesh 和 GT mesh 上分别采样点云,计算 Chamfer Distance
KL 正则化 \(\mathcal{L}_{KL}\):标准的 latent space 正则化。
扩散模型训练¶
在 Sparconv-VAE 的结构化稀疏 latent 上训练 3D 扩散模型:
- \(\mathbf{z}_t\) 是加噪后的稀疏 3D latent
- \(c\) 是条件信号(文本/图像)
- 扩散模型本身也使用稀疏卷积 U-Net
架构参数¶
Sparconv-VAE¶
- 编码器:多级 sparse 3D convolution 下采样
- 输入分辨率:\(1024^3\)(稀疏 voxel)
- 下采样到 \(128^3\) 或 \(64^3\) 的稀疏 latent
- 每级使用 ResBlock + sparse conv
- 解码器:对称的多级上采样结构
- 每级 sparse transposed convolution + ResBlock
- skip connection 连接对称层
- 输出 Sparcubes 表示(SDF + deformation + weights)
扩散模型¶
- 基于 sparse 3D U-Net
- 在稀疏 latent 上做标准 DDPM/flow matching
- 整个管线保持 3D 原生
实验结果¶
评估设置¶
- 数据集:Objaverse(过滤后的高质量子集)
- 对比方法:
- 2D 监督 VAE:TripoSG 的 VAE
- Dense 3D 方法:标准 3D VAE(dense grid)
- 其他稀疏方法:TRELLIS (SLAT)、OctFusion
VAE 重建质量¶
| 方法 | Chamfer Distance ↓ | F-Score ↑ | 分辨率 |
|---|---|---|---|
| Dense 3D VAE | 较高 | 较低 | \(256^3\) |
| TripoSG VAE (2D 监督) | 中等 | 中等 | - |
| Sparconv-VAE | 最低 | 最高 | \(1024^3\) |
关键发现¶
- 模态一致的 3D 原生管线在同等 latent 维度下重建保真度优于 2D 监督路线
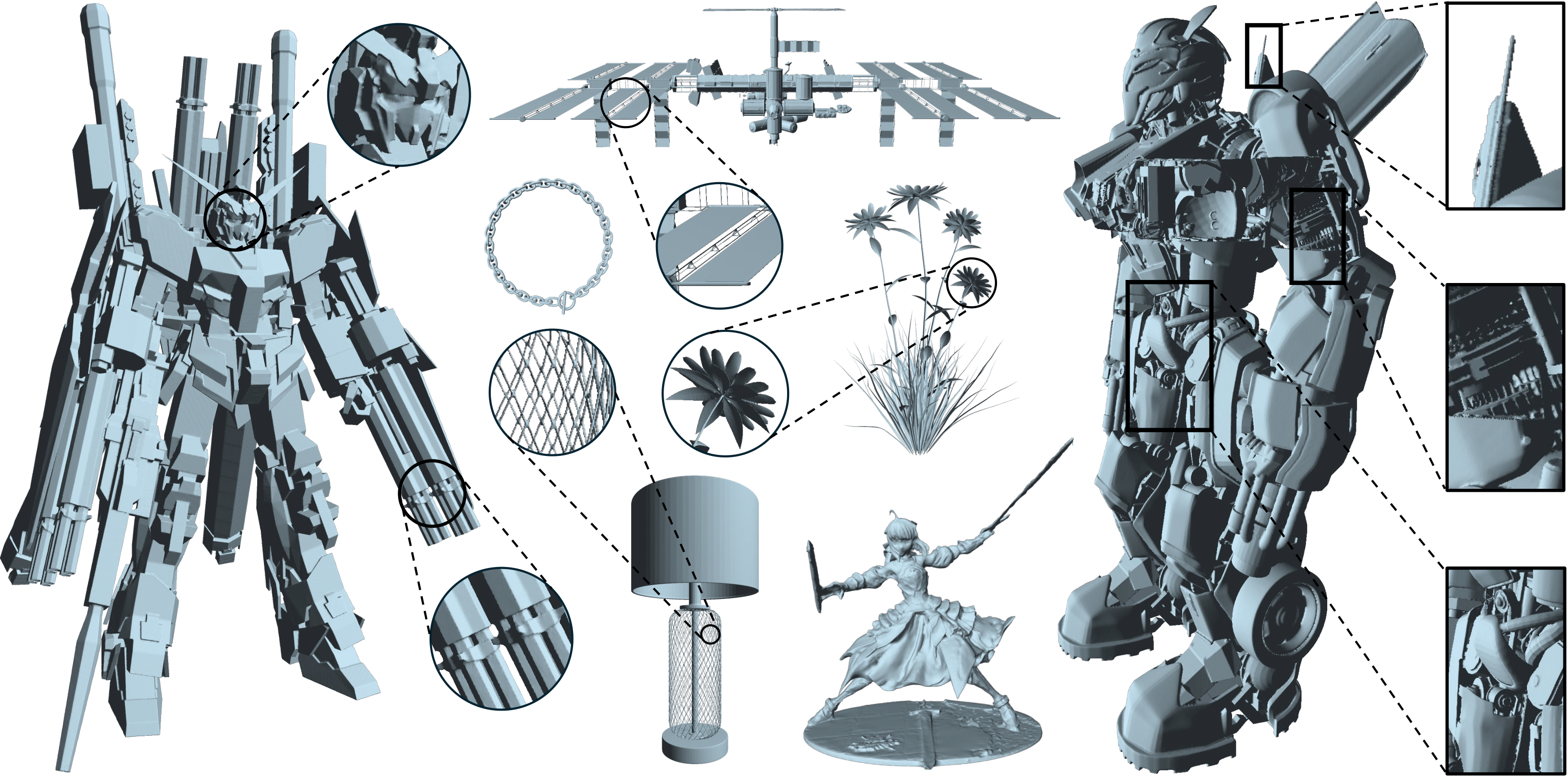
- \(1024^3\) 分辨率的稀疏表示能捕捉细节几何(如文字浮雕、薄壁结构)
- 端到端生成质量(扩散 + VAE 解码)在视觉上与 TripoSG 可比,但几何精度更高
- 训练效率:稀疏卷积使得高分辨率训练显存可控
为什么"模态一致"很重要¶
以 TripoSG 为例:
- 输入 mesh → 多视角渲染 → 2D 编码器 → latent
- latent → 解码器 → SDF/FlexiCubes → mesh
每次 2D-3D 转换都是有损的。TripoSG 的生成质量已经很好,但如果放大到细节级别,几何精度仍然受到这个管线的制约。
Sparc3D 消除了所有中间的模态转换,直接在 3D 空间做压缩和重建。实验表明,在同等 latent 维度下,Sparconv-VAE 的重建保真度高于用 2D 监督训练的 VAE。
与 latent diffusion 的集成¶
Sparconv-VAE 产出的 latent 是结构化的稀疏 3D 特征图。在此之上可以直接用 3D latent diffusion 做生成:
- 扩散模型也可以用稀疏卷积 U-Net
- 整个管线保持 3D 原生,不需要转换
与其他工作的关系¶
相比 SparseFlex¶
- SparseFlex 也是稀疏 isosurface 表示,但更偏基础设施层
- Sparc3D 在 SparseFlex 基础上构建了完整的 modality-consistent VAE pipeline
- Sparc3D 更强调 VAE 中的模态匹配问题
相比 TRELLIS / SLAT¶
- TRELLIS 用 structured latent 但 VAE 训练时仍有 2D 渲染监督
- Sparc3D 完全在 3D 空间训练,没有 2D 监督
相比 TripoSG / Hunyuan3D¶
- TripoSG 和 Hunyuan3D 的 VAE 依赖多视角渲染损失
- Sparc3D 用 3D 几何损失直接监督,模态更一致
相比 OctFusion¶
- OctFusion 用八叉树隐表示 + 多尺度扩散
- Sparc3D 用 Sparcubes 稀疏表示 + 稀疏卷积 VAE
- 两者都是 3D 原生路线,但表示方式不同
优势与局限¶
优势¶
- 模态一致性:端到端 3D 原生管线,无 2D-3D 模态转换
- 高分辨率:支持 1024^3 稀疏重建
- 支持复杂拓扑(开放表面、断开组件)
- 重建保真度在同类方法中领先
局限¶
- 稀疏卷积实现对工程基础设施要求高(需要 MinkowskiEngine / TorchSparse 等)
- 仍然是 isosurface 路线,最终 mesh 质量受限于 Marching Cubes 变体
- 训练数据需要预处理为 Sparcubes 格式
- 论文为 2025 年预印本(arXiv: 2505.14521)
一句话总结¶
Sparc3D 通过 Sparcubes 稀疏可变形 Marching Cubes 表示和纯 3D 稀疏卷积 VAE(Sparconv-VAE),构建了一套模态一致的 3D 生成管线,消除了 2D-3D 模态转换带来的细节损失,在 1024^3 分辨率下实现了高保真 3D shape 重建和生成。