LATO¶
LATO: 3D Mesh Flow Matching with Structured TOpology Preserving LAtents (arXiv 2603.06357, March 2026)
LATO 解决的是 3D 生成中一个核心矛盾:隐式场方法擅长几何但丢失拓扑,自回归方法保留拓扑但受限于序列长度。LATO 提出了一种保拓扑的稀疏体素表示 T-Voxels,让 flow matching 扩散模型可以直接生成带有显式连接关系的 3D 网格,同时保持高推理效率。
核心问题¶
当前 3D 生成存在一个两难困境:
- 隐式场路线(TRELLIS、TripoSG、CLAY 等):依赖 Marching Cubes 提取网格,生成的三角面片极其密集且不规则,不符合美术需求,且训练数据必须是水密(watertight)的
- 自回归路线(MeshGPT、BPT、MeshAnything V2 等):直接生成显式 mesh 拓扑,但序列长度随面数二次增长,训练时必须截断序列,导致破面和断裂
LATO 的思路是:
设计一种将 mesh 的顶点位置和连接关系都编码进稀疏体素隐空间的表示(T-Voxels),使连续 flow matching 模型能直接生成拓扑信息,同时避免自回归的序列长度瓶颈。
Vertex Displacement Field (VDF)¶
LATO 的第一步是将显式 mesh 拓扑转化为适合神经网络学习的连续表示。
给定一个 mesh \(M = (V, F)\),对于表面上采样的任意点 \(p\)(位于面 \(f\) 上),VDF 定义为:
即从采样点指向其所在三角面三个顶点的相对位移向量集合。
为什么用 VDF 而不是语义标签¶
一种朴素替代方案是给表面点打标签(vertex / edge / face 三类),但存在两个问题:
- 类别不平衡:顶点和边在连续表面上是零测度集,随机采样几乎采不到,监督信号极弱
- 离散标签不连续:分类标签在隐空间中产生突变,阻碍扩散模型的梯度流
VDF 提供了密集且连续的监督信号:表面上的每一个点都携带指向其所在面三个顶点的位移信息,同时隐含了边的连接关系。
Sparse Voxel VAE 与 T-Voxels¶
编码器¶
- 在 mesh 表面均匀采样 \(K = 819,200\) 个点
- 对每个点构建特征向量 \(x_k = [p_k, F(p_k), n(p_k)]\)(位置 + VDF 位移 + 法线)
- 空间离散化为稀疏体素网格,每个体素内通过 PointNet(共享 MLP + 均值池化)聚合局部特征
- Sparse Transformer(维度 512,8 个头)捕获全局上下文
- 输出每个活跃体素的均值和方差,通过重参数化采样得到 T-Voxel 隐变量
最终 T-Voxel 隐空间为 \(128^3\) 分辨率、16 通道。
解码器:层次化细分与剪枝¶
直接回归顶点坐标很困难,因为不同 mesh 的顶点数量差异很大。LATO 采用 hierarchical subdivide-and-prune 策略:
- 初始剪枝:Sparse Transformer + 线性分类器预测每个 T-Voxel 的占用概率,丢弃概率 < 0.5 的体素
- 级联细化(\(L=3\) 级):每级执行:
- 体素细分:每个活跃父体素分裂为 \(2^3=8\) 个子体素
- 特征初始化:复制父特征 + 相对位置编码 + 3D 卷积
- 剪枝头:去除空子体素
- Sparse Self-Attention:聚合局部上下文
- Cross-Attention:子体素作为 query,原始 T-Voxels 作为 key/value,回传全局信息
- 最终输出:剩余体素的中心坐标即为预测的顶点集 \(\{\hat{v}\}\)
Connection Prediction Head¶
为恢复完整拓扑,需要预测所有顶点对之间的边连接:
- 顶点体素特征通过 Cross-Attention 与 T-Voxels 聚合全局上下文
- 连接两个顶点 \(\hat{v}_i\) 和 \(\hat{v}_j\) 的特征,经 MLP 预测边存在概率
- 排列不变性:对 \((h_i \oplus h_j)\) 和 \((h_j \oplus h_i)\) 两种拼接顺序分别预测,取平均
训练时的采样策略:正样本包含所有真实边对应的顶点对;每个顶点额外采样 \(N_n\) 个邻近顶点和 \(N_r\) 个随机顶点构成负样本,避免二次复杂度。推理时穷举所有顶点对以确保完整性。
损失函数¶
VAE 端到端训练,总损失为:
| 损失项 | 公式 | 作用 |
|---|---|---|
| \(\mathcal{L}_{\text{prune}}\) | 各层级 BCE loss(Eq. 4) | 监督每层体素占用概率 |
| \(\mathcal{L}_{\text{vtx}}\) | Asymmetric Loss(Eq. 5),\(\gamma_- = 4\), \(\gamma_+ = 0\) | 最终层顶点定位,通过非对称权重解决正负样本不平衡 |
| \(\mathcal{L}_{\text{conn}}\) | BCE loss(Eq. 6) | 监督边连接预测 |
| \(\mathcal{L}_{\text{KL}}\) | KL 散度正则化 | 约束潜空间分布 |
其中 Asymmetric Loss 的关键在于下调负样本权重(\(\gamma_- > \gamma_+\)),因为在高分辨率体素中顶点只占极小比例。
Flow Matching 生成¶
生成阶段采用类似 TRELLIS 的两阶段级联 flow matching:
Stage 1:结构体素生成¶
- 从 TRELLIS 预训练的结构模型微调而来
- 从 \(32^3\) 隐变量生成 \(128^3\) 分辨率的稀疏体素占用
- 微调时加入了开放表面和非流形资产的监督
Stage 2:拓扑特征生成¶
- 条件 Flow Matching Transformer
- 以 Stage 1 输出的占用体素为空间锚点
- 合成 16 通道的 T-Voxel 特征
- 以顶点数量 \(c_v = \log(N_v)\) 为额外条件
- 损失函数:\(\mathcal{L}_{\text{Flow}}(\theta) = \mathbb{E}_{z,t,\epsilon}\left[\|v_\theta(z_t, t, c_v) - (\epsilon - z_0)\|^2\right]\)
推理时先采样结构体素,再生成 T-Voxel 特征,最后送入解码器得到顶点和连接关系。
训练配置¶
| 参数 | 值 |
|---|---|
| PointNet 特征维度 | 1024 |
| Sparse Transformer 维度 | 512, 8 heads |
| T-Voxel 分辨率 | \(128^3\) |
| T-Voxel 通道数 | 16 |
| 解码器 bottleneck 维度 | 512 |
| 采样点数 \(K\) | 819,200 |
| 训练数据 | ~400K assets (TRELLIS-500K, Objaverse, Toys4K, ABO) |
| 优化器 | AdamW, cosine schedule \(10^{-4} \to 10^{-5}\) |
| VAE 训练 | 8× H100, 4 天, batch=8/GPU |
| Flow Matching 训练 | 7 天, effective batch=128 |
实验结果¶
VAE 重建质量¶
| 方法 | CD(L2) ↓ | HD ↓ | NC ↑ |
|---|---|---|---|
| MeshGPT | 0.042/0.050 | 0.070/0.096 | 0.824/0.831 |
| PivotMesh | —/0.129 | —/0.263 | —/0.614 |
| MeshCraft | 0.150/0.243 | 0.282/0.299 | 0.531/0.625 |
| LATO | 0.042/0.040 | 0.065/0.092 | 0.847/0.834 |
(数值格式为 dense/artistic mesh)
几何条件生成质量¶
| 方法 | CD(L2) ↓ | HD ↓ | NC ↑ |
|---|---|---|---|
| MeshAnything V2 | 0.108/0.066 | 0.227/0.137 | 0.696/0.766 |
| Mesh Silksong | 0.062/0.052 | 0.145/0.101 | 0.784/0.818 |
| FastMesh | 0.064/0.048 | 0.110/0.102 | 0.757/0.813 |
| BPT | 0.059/0.052 | 0.107/0.088 | 0.811/0.824 |
| DeepMesh | 0.051/0.046 | 0.092/0.089 | 0.828/0.827 |
| LATO | 0.043/0.044 | 0.084/0.081 | 0.832/0.835 |
推理效率¶
| 方法 | 类型 | 生成 ~5K 面 | 生成 ~15K 面 |
|---|---|---|---|
| DeepMesh | AR | ~416s | ~566s |
| BPT | AR | ~109s | ~252s |
| MeshSilkSong | AR | ~180s | ~300s |
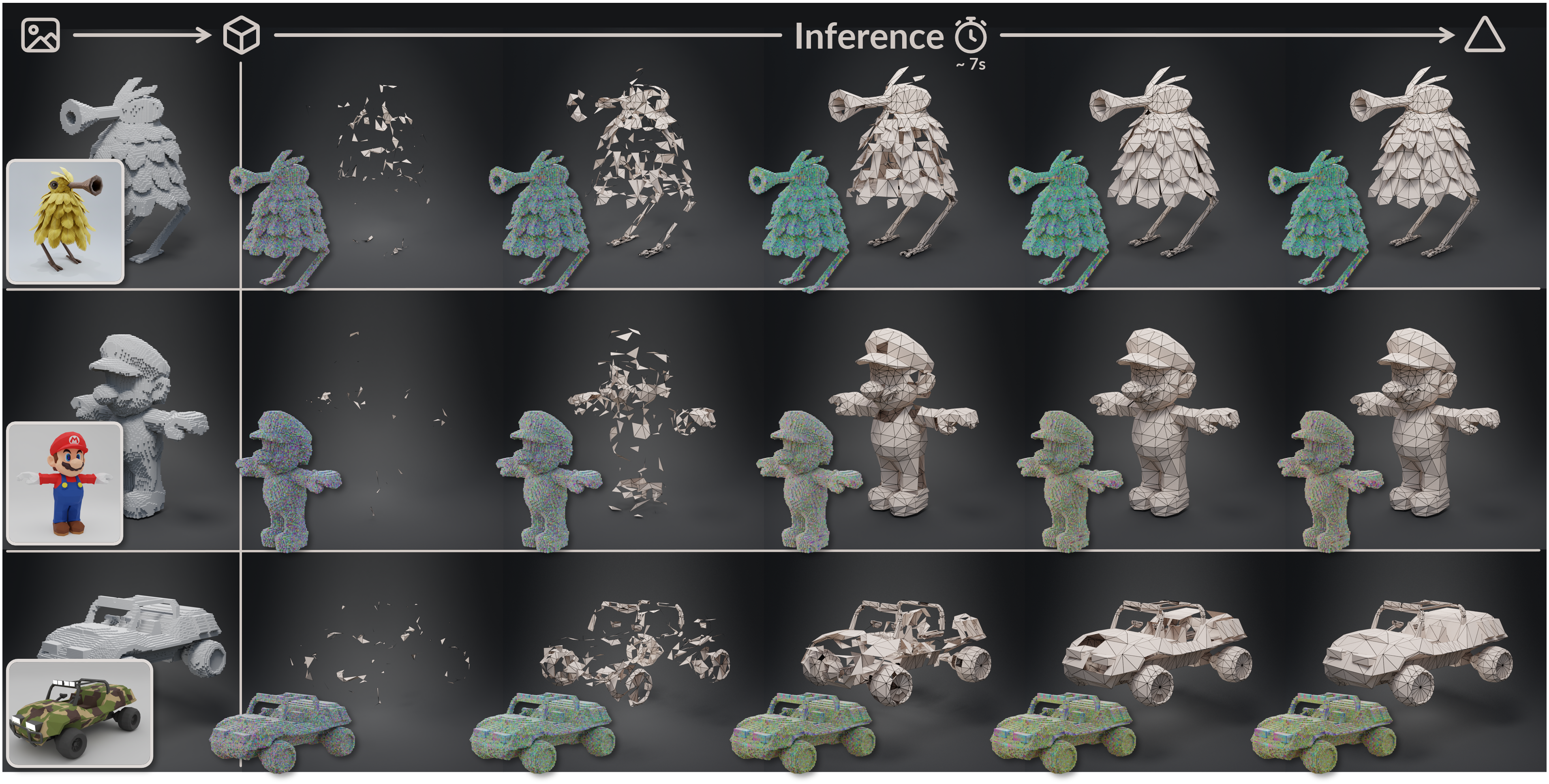
| LATO | Flow | ~5.3s | ~9.9s |
LATO 的推理时间几乎不随面数增长而变化(flow matching 是并行去噪),而自回归方法的时间与面数成正比。
Ablation Study¶
VDF 输入的必要性¶
| 输入配置 | CD(L2) ↓ | HD ↓ | NC ↑ |
|---|---|---|---|
| w/o \(n(p)\)(去掉法线) | 0.040 | 0.076 | 0.832 |
| w/o \(F(p)\)(去掉 VDF) | 0.043 | 0.092 | 0.822 |
| Full model | 0.039 | 0.075 | 0.837 |
去掉 VDF 位移信息后重建质量下降,尤其在拓扑保真度(NC)上。
连接预测策略¶
几何算法(基于距离阈值)在重建时勉强可用,但在生成样本上因分布偏移而崩溃;学习式 Connection Head 在两种情况下都稳定工作。
局限¶
- VDF 分辨率受限于底层稀疏体素网格,难以表示极小三角面片或超精细几何细节
- 连接头在推理时需要穷举所有顶点对,计算复杂度随顶点数二次增长
- 当前生成的 mesh 面数和质量不及工业级资产(如 Blender 制作的),仍有差距
- 依赖 TRELLIS 预训练的结构模型作为第一阶段,并非完全独立的生成管线
与其他方法的定位¶
LATO 在 3D mesh 生成的方法谱中占据一个独特的位置:
| 路线 | 代表方法 | 拓扑 | 效率 | 几何 |
|---|---|---|---|---|
| 隐式场 + MC | TRELLIS, TripoSG | 密集不规则 | 快 | 好 |
| 自回归 | MeshGPT, BPT, DeepMesh | 可控 | 慢 | 受限 |
| LATO (T-Voxels) | 本文 | 可控 | 快 | 好 |
LATO 是第一个在保持 flow matching 效率的同时实现显式拓扑建模的方法,为未来结合两条路线的优势提供了新的范式。
总结¶
LATO 通过 Vertex Displacement Field 将 mesh 拓扑信息转化为连续密集信号,再通过 Sparse Voxel VAE 压缩为 T-Voxels 隐空间,使 flow matching 模型能直接生成带有显式顶点位置和连接关系的 mesh。它在几何精度上匹敌隐式场方法,在拓扑质量上匹敌自回归方法,同时推理效率高出一个数量级。